Ongoing Projects
Below are my current research projects that I am actively working on. These projects represent ongoing investigations in robotics, AI, and computer vision.
Pose-aware Topological Mapping
2025 - Present
A pose-aware online topological mapping system that performs sequential hypothesis testing directly in continuous SE(3) space to achieve human-like, robust relocalization under perceptual aliasing and environmental change.
Data-Driven RL for Social Navigation
2025 - Present
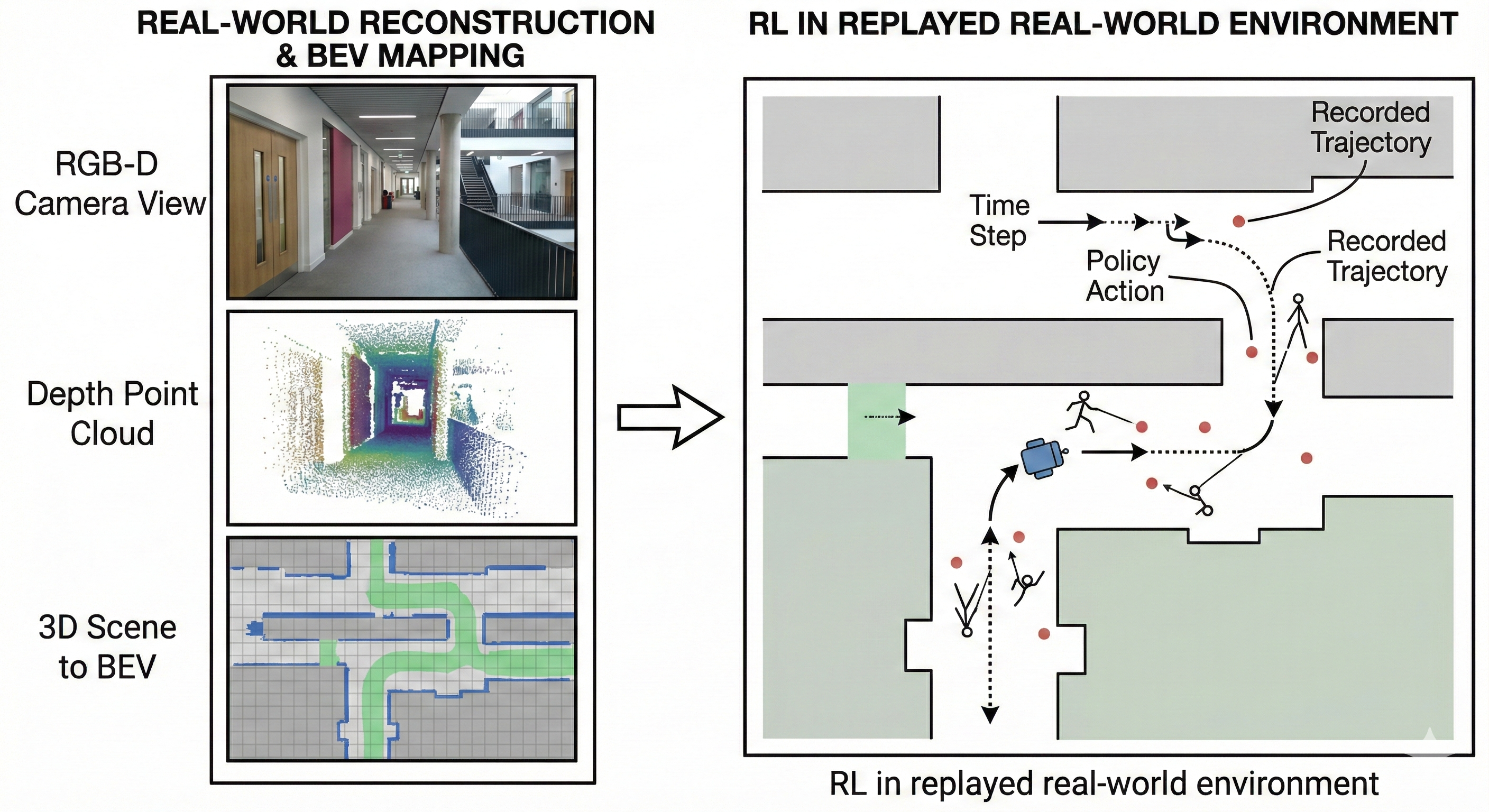
A data-driven RL framework for social navigation that turns real-world human–robot navigation logs into replayable "imagination environments," where a robot learns policies from BEV maps reconstructed from RGB-D data and replayed human trajectories, without relying on a conventional simulator.
Vision-Language Navigation
2025 - Present
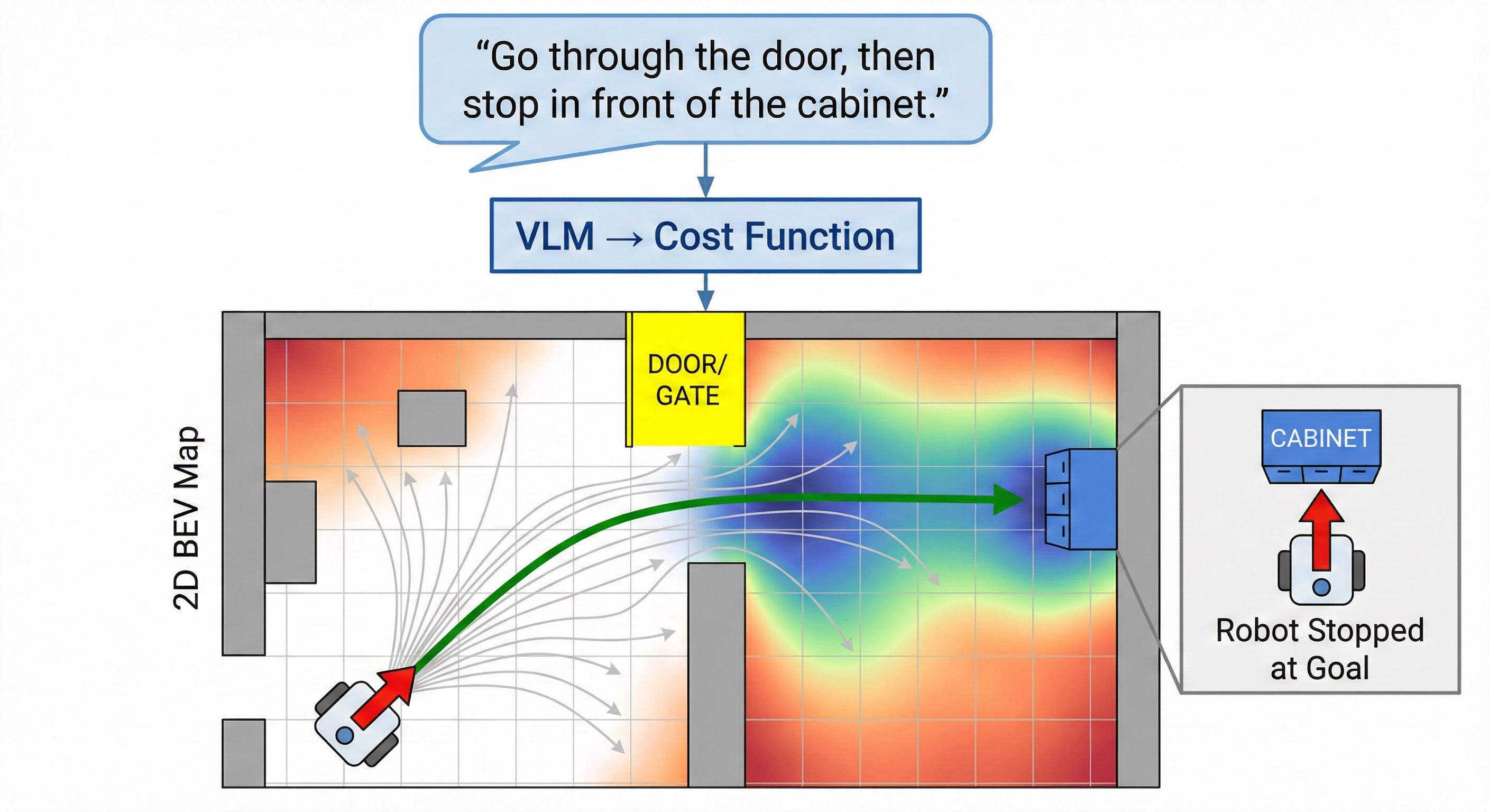
Use a vision–language model to translate natural-language navigation instructions into differentiable cost functions over a BEV scene, then optimize or select trajectories that minimize this cost—enabling zero-shot visual-language navigation without policy training.
Offline RL for Vision-Language-Action Models
2025 - Present
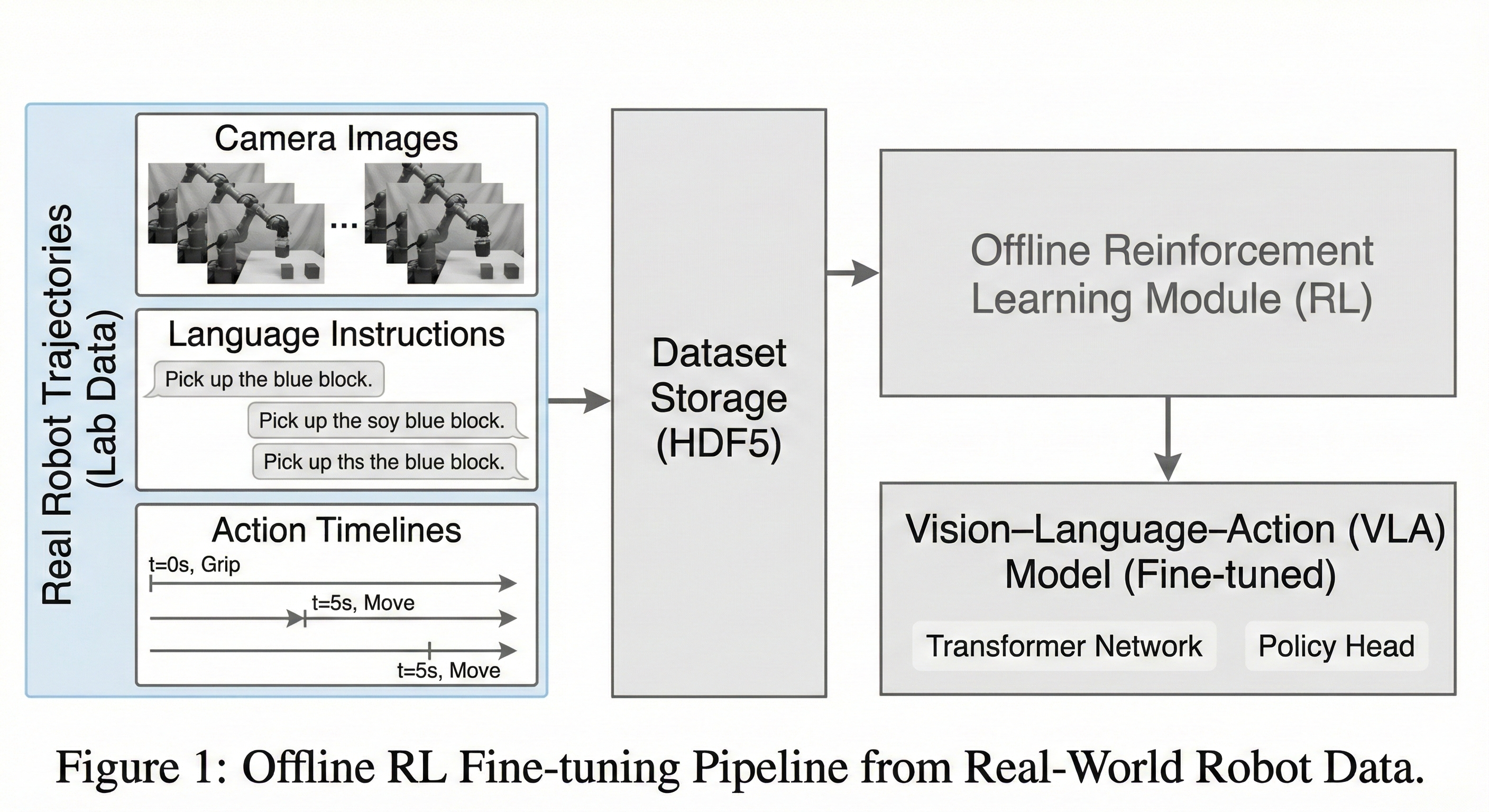
Using offline reinforcement learning to fine-tune vision–language–action (VLA) models from real robot interaction datasets collected in laboratory environments.
Vision-Language Navigation
Abstract
This project leverages vision–language models to enable zero-shot visual-language navigation without the need for explicit policy training. The system translates natural-language navigation instructions into differentiable cost functions defined over bird's-eye-view (BEV) scene representations.
By optimizing or selecting trajectories that minimize these learned cost functions, the robot can follow complex natural language instructions while navigating through real-world environments. This approach eliminates the traditional requirement for large-scale policy training on navigation datasets.
The method enables flexible, instruction-following navigation that can adapt to diverse language commands and environmental contexts, bridging vision, language, and action in a unified framework.
Offline RL for Vision-Language-Action Models
Abstract
This research focuses on using offline reinforcement learning to fine-tune vision–language–action (VLA) models using real robot interaction datasets collected in laboratory environments. Rather than training from scratch, we leverage pre-trained VLA models and adapt them to specific robotic tasks through offline RL.
By learning from logged interaction data, the system can improve task performance without requiring extensive online exploration, which can be costly and time-consuming in real-world robotics. This approach enables safer and more efficient learning from limited real-world data.
The method demonstrates how large-scale pre-trained models can be effectively specialized for robotic manipulation and navigation tasks through principled offline learning, accelerating the deployment of capable robot systems in real-world environments.
Data-Driven RL for Social Navigation
Abstract
We propose a data-driven reinforcement learning framework for social navigation that turns real-world human–robot navigation logs into replayable "imagination environments." This approach allows robots to learn navigation policies directly from logged RGB-D data and human trajectories, eliminating the need for conventional simulators.
The system reconstructs bird's-eye-view (BEV) maps from RGB-D observations and replays recorded human trajectories within these environments. The robot can then train and refine its navigation policies by interacting with these reconstructed scenarios, learning socially-aware behaviors from real-world data.
This framework bridges the gap between simulation-based training and real-world deployment, enabling robots to learn from actual human–robot interactions without the complexities and limitations of traditional simulation environments.